ربات سه پا “MARM” ممکن است به زودی به فضاپیما در مدار بپیوندد.
به گزارش ایسنا و به نقل از نیواطلس، طرفداران داستان های علمی تخیلی ممکن است ربات های دوپا را از فیلم Silent Running محصول 1972 به یاد داشته باشند. ربات های خارج از سفینه فضایی را تعمیر کنید. ربات جدید “MARM” کمی به آنها شباهت دارد، با این تفاوت که سه دست و پا دارد.
MARM که در حال حاضر در مرحله بتا است، توسط گروهی از محققان موسسه فناوری ایتالیا (IIT) به رهبری نیکولاس ساگاراکیس توسعه داده شده است. او قبلا ربات آتش نشان انسان نما “Walk-Man” را ساخته بود.
MARM که مخفف Multi-Arm Relocatable Manipulator است، به عنوان بخشی از پروژه Mirror آژانس فضایی اروپا توسعه یافته است و در حالی که این ربات به طور قابل توجهی همه کاره است، در درجه اول برای یافتن راه خروج از همه فضاپیماها و انجام وظایف نصب طراحی شده است. یا حذف واحدهای مداری.
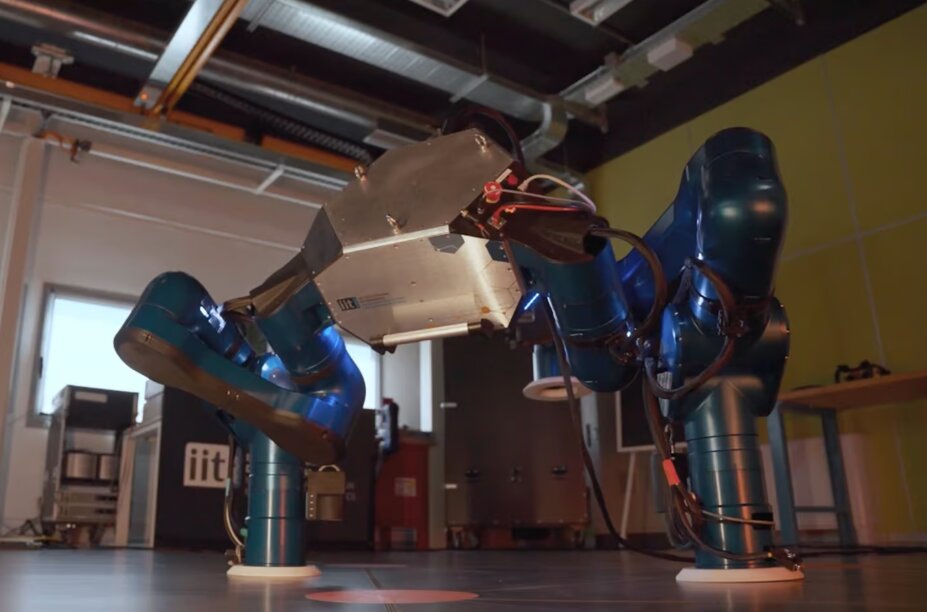
به طور خلاصه، این ربات از یک بدنه اصلی چرخان و سه اندام مفصلی تشکیل شده است که هم به عنوان دست و هم پا عمل می کنند.
مکانیزمی در زیر پا یا بازوی ربات، آن را به قطعات عایق شش ضلعی که بیشتر قسمت بیرونی فضاپیما را می پوشاند، متصل می کند و MARM را به طور ایمن در جای خود نگه می دارد. در صورت نیاز، می توان از همین فرآیند برای تعویض قطعات عایق و شارژ باتری های ربات و ارسال و دریافت داده ها از طریق ایستگاه های داک در خارج از فضاپیما استفاده کرد.
مزیت طراحی MARM این است که با راه رفتن روی سه پا، ربات همیشه حداقل دو نقطه تماس را حفظ می کند و به راحتی می تواند در هر جهتی که لازم باشد حرکت کند. علاوه بر این، هنگام استفاده از یک بازو برای انجام یک عمل، دو بازوی دیگر به عنوان لنگر عمل می کنند و یک ربات عامل بسیار پایدار را ارائه می دهند.
به گفته تساگاراکیس، MARM در نهایت نیمه خودکار خواهد شد. برای مثال، از دوربینهای داخلی استفاده میکند تا دقیقاً روی هر قسمت از عایق بیرونی فضاپیما هنگام راه رفتن قدم بگذارد، اما یک اپراتور انسانی احتمالاً هنگام برداشتن و نصب واحدهای تجهیزات، آن را راهنمایی میکند. انتظار می رود این ربات به زودی قبل از استفاده در یک فضاپیمای واقعی در یک شبیه ساز فیزیکی آزمایش شود.
انتهای پیام